この機械は平成24年度ものづくり中小企業・小規模事業者試作開発等支援補助金の
採択、交付を受け、弊社が独自に開発、設計、製作をしたマシンです。防爆仕様のサーボモーター2機と防爆仕様のタッチパネル配電盤から構成され、様々な動きをプログラム制御可能としました。









設計
制御盤の設計においては、可燃性ガスが存在する危険場所に設置する洗浄ロボット制御盤と、石油タンク外縁部の非危険場所に設置する内圧保護監視盤の2個の制御盤で構成しました。2個の制御盤は電線ケーブルと空圧配管で接続し、内圧保護監視盤に内臓の空圧ポンプから洗浄ロボット制御盤に圧縮空気を供給し、洗浄ロボット制御盤内部に可燃性ガスが侵入しない構造としました。圧縮空気の圧力は常にセンサーで監視し、洗浄ロボット制御盤への電源供給/遮断の条件を設定し、安全性が確保されるようにしています。
洗浄ロボットに装着するサーボモータは、耐圧防爆形を採用し防爆基準を満たしています。
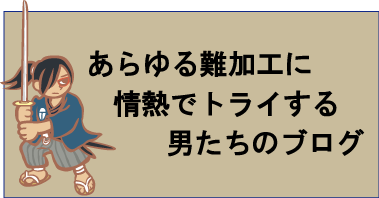
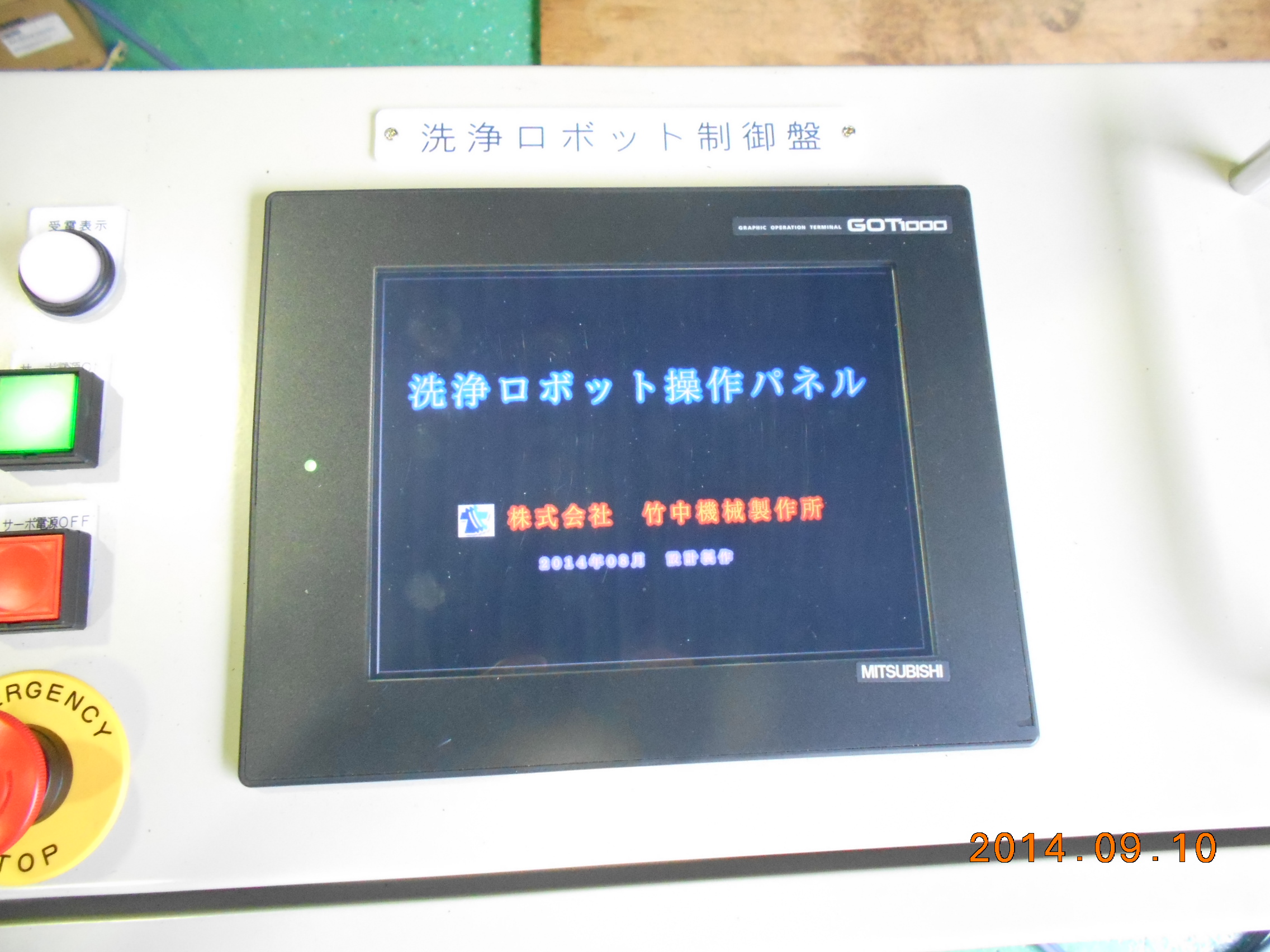
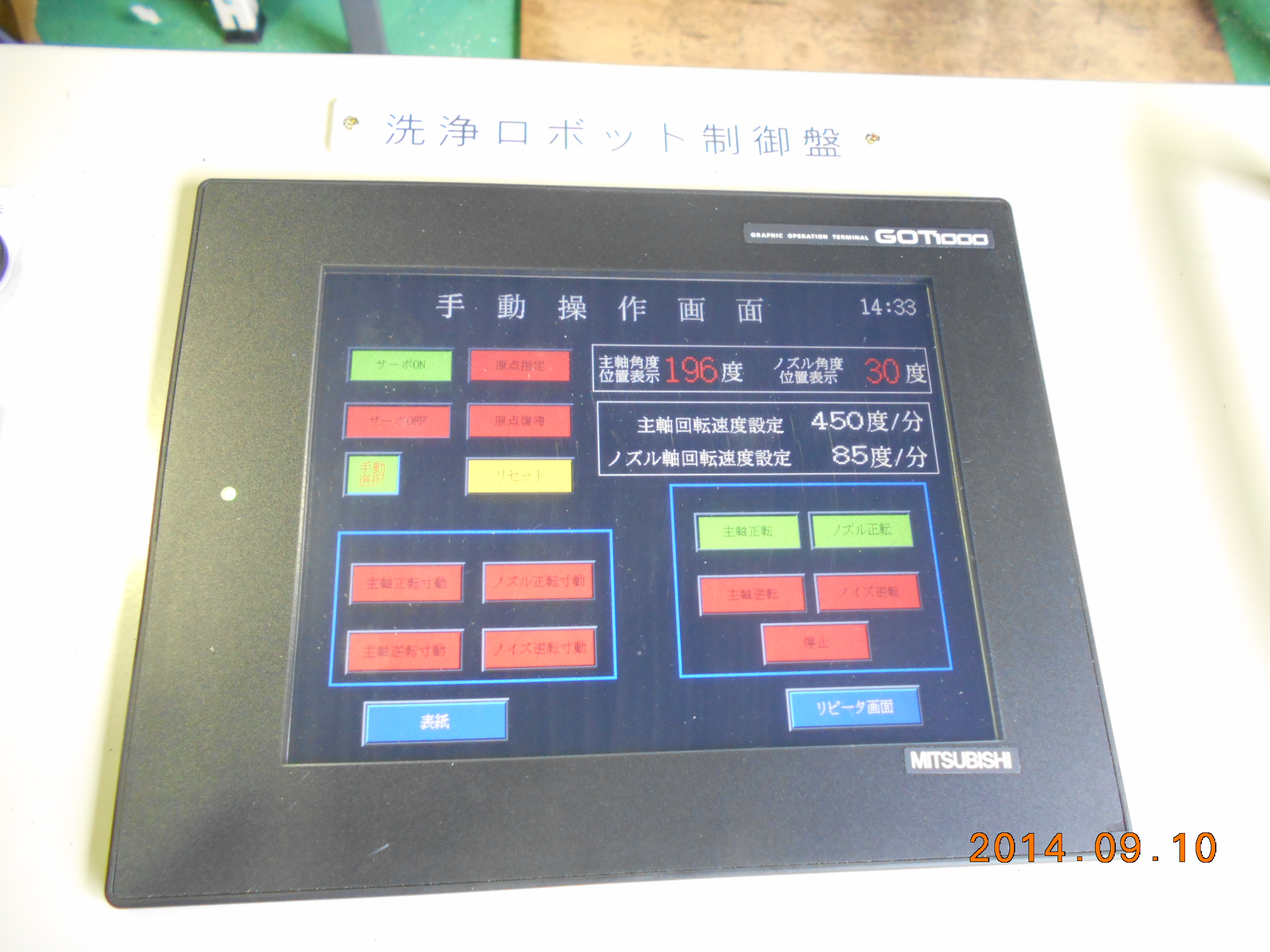
ロボット制御盤の操作部にはタッチパネルを採用し、画面切換機能を利用して、多種の運転モードに対応できる操作性を獲得。
洗浄ロボットの機構部分の設計においては、サーボモータの特性から動力伝達部を空圧モータ式よりシンプルに設計。また、サーボモータ用減速機はハーモニックドライブ減速機を採用し、高速回転にも対応するコンパクトで高強度の減速機構となっております。
サーボモータ駆動の優位性について(エアーモータ駆動との比較)
1. 運転速度範囲の拡大
最高速度は従来の2倍になった。低速側は従来は絞り弁で速度調整するため微速にすると停止してしまうなど不安定な状況があるが、サーボでは微速でも安定駆動ができる。
したがってタンク内のスラッジの堆積状態に合わせて最適な運転速度が選択できるようになり、洗浄効率の向上につながる。(効率アップ1.2)
2. ノズル角度の設定の細密化
従来は30°単位での設定だったが、サーボ式では1°単位が可能になった。
洗浄対象を正確にねらえるので洗浄効果が向上する。(効率アップ1.2)
3. 運転モード設定の容易性
タッチパネル上で運転モードを選択するだけで設定が可能になった。
従来の設定方法は、ノズル角度の設定では洗浄機本体の回転方向切換ドッグを取り外し、新しい位置に付け替える作業をし、運転速度の設定では空圧絞り弁を調整し、ストップウォッチで回転時間を測定する作業が必要だった。1回あたり従来15分かかった設定作業が2分程度に短縮できた。実際の洗浄工事では、この設定作業を何回も繰り返すので時間短縮効果は大きくなる。(効率アップ1.1)
これらの優位性から総合的な洗浄作業効率は従来の1.6倍(1.2×1.2×1.1)、約37%の洗浄時間短縮になると推定される。
現在、ロボット洗浄マシンは開発段階のため、実際の現場での使用は今後のテスト結果により可能とな
ります。